Shader 数学基础
坐标系
笛卡尔坐标系(法语:système de coordonnées cartésiennes,英语:Cartesian coordinate system,也称直角坐标系)在数学中是一种正交坐标系,由法国数学家勒内·笛卡尔引入而得名。二维的直角坐标系是由两条相互垂直、相交于原点的数线构成的。
在平面内,任何一点的坐标是根据数轴上对应的点的坐标设定的。在平面内,任何一点与坐标的对应关系,类似于数轴上点与坐标的对应关系。
采用笛卡尔坐标系,几何形状可以用代数公式明确地表达出来。几何形状的每一个点的直角坐标必须遵守这个代数公式。
直线: ${\displaystyle ax+by+c=0}$
斜截式 : ${\displaystyle y=mx+k}$
圆 : ${\displaystyle (x-a)^{2}+(y-b)^{2}=r^{2}}$
众所周知,OpenGL使用的是右手坐标系,而Direct3D使用的是左手坐标系。
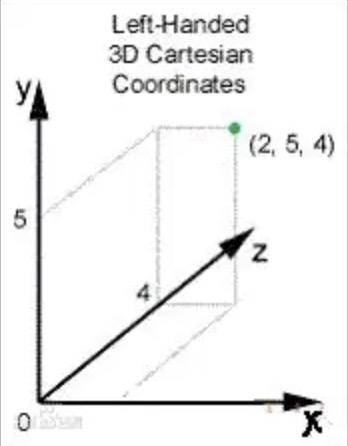
Unity 使用的是左手坐标系。
点和向量
点和向量
点是三维空间中的某个坐标,是绝对的,它的值是参照原点的,而向量用于表示力和速度等具有方向和大小的量, 通常用具有长度和方向的线段来表示,虽然他们都具有三个分量,但对于向量,如果将向量放在坐标系中的任何位置(平移),都不会改变其性质,因为向量表示的是方向和大小,与位置距离无关,它的值是相对与基准点的。
向量的模
向量的绝对值就是向量的长度,也称模,计算公式为:
- $l =\sqrt{a^2+b^2+c^2} $
单位向量
单位向量就是模(向量长度)为1的向量,也就是某向量每单位长度的向量。单位向量u的计算公式为:
- $u=\frac{V}{\left | V \right | } $
向量的运算
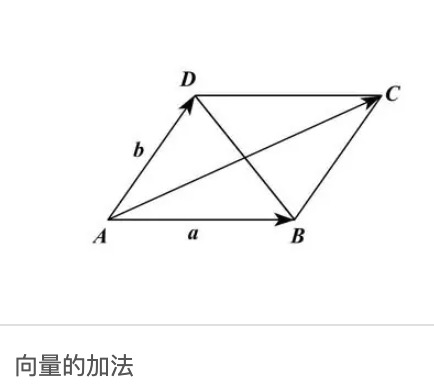
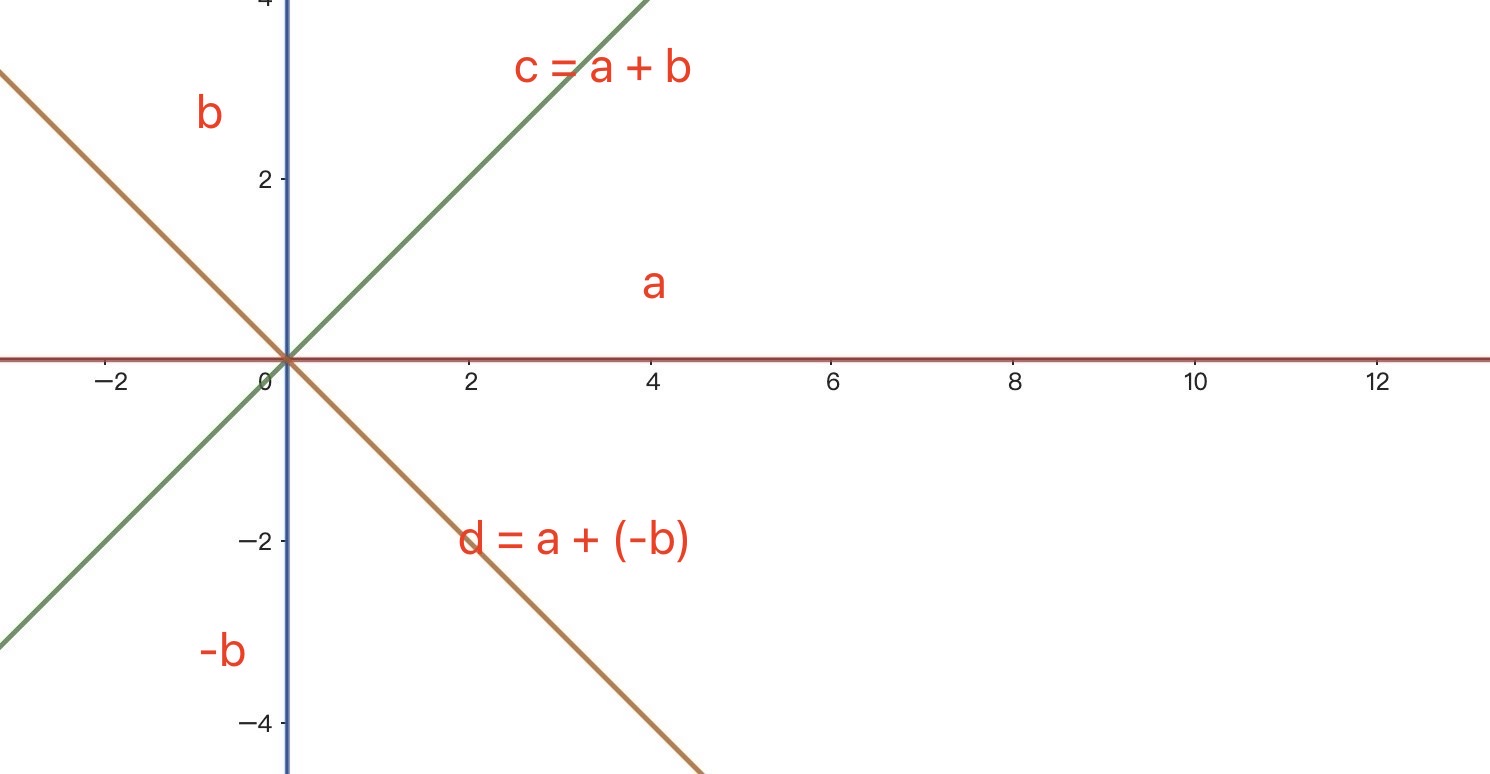
向量的加法
向量的加法得到的是一个向量
加法公式 :
- $u+v=w=(u_{x}+v_{x}, u_{y}+v_{y})$
向量的减法
向量的减法得到的也还是一个向量
减法公式 :
- $u-v=w=(u_{x}-v_{x}, u_{y}-v_{y})$
向量的点乘
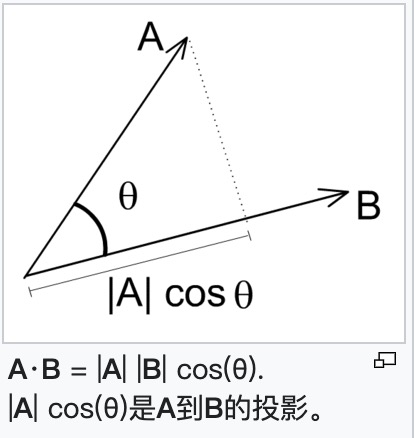
向量的点乘代表的是一个投影,公式如下:
$\vec{a} * \vec{b} = \left | \vec{a} \right | * \left | \vec{b} \right | * \cos \theta $
其中 $\theta$ 是 向量 $\vec{a}$ 和 向量 $\vec{b}$ 的夹角
举一个最简单的例子,如果 $\theta$ 等于 45°,那么斜边投影在侧边上的长度刚好为1。
向量的叉乘
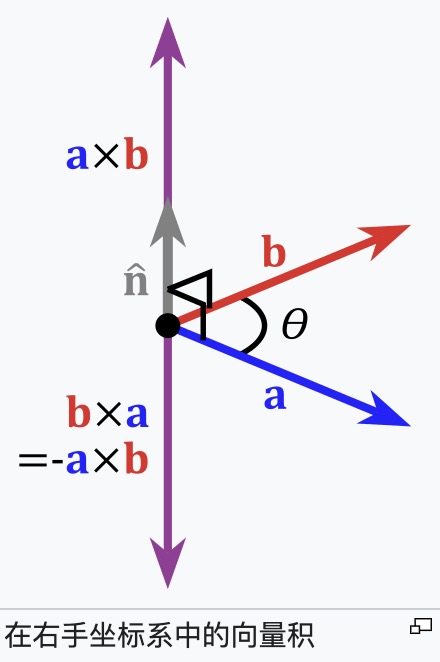
这是一个三维坐标系,其中向量 $\vec{w}$ 向量 $\vec{v}$ 向量 $\vec{u}$ 分别代表每个轴,如果这个时候:
$\vec{w}$ = $\vec{u}$ x $\vec{v}$
$\vec{w}$ 的指向按右手定则从 $\vec{u}$ 转向 $\vec{v}$ 来确定
$\vec{w}$ 向量的模长在数值上等于以 $\vec{u}$、$\vec{v}$ 形成的夹角 $\theta$ 组成的平行四边形的面积
矩阵(Matrix)
在数学中,矩阵(Matrix)是一个按照长方阵列排列的复数或实数集合 ,最早来自于方程组的系数及常数所构成的方阵。
由 m × n 个数aij排成的m行n列的数表称为m行n列的矩阵,简称m × n矩阵。记作:
这 m×n 个数称为矩阵A的元素,简称为元,数aij位于矩阵A的第i行第j列,称为矩阵A的(i,j)元,以数 aij为(i,j)元的矩阵可记为(aij)或(aij)m × n,m×n矩阵A也记作Amn。
元素是实数的矩阵称为实矩阵,元素是复数的矩阵称为复矩阵。而行数与列数都等于n的矩阵称为n阶矩阵或n阶方阵。
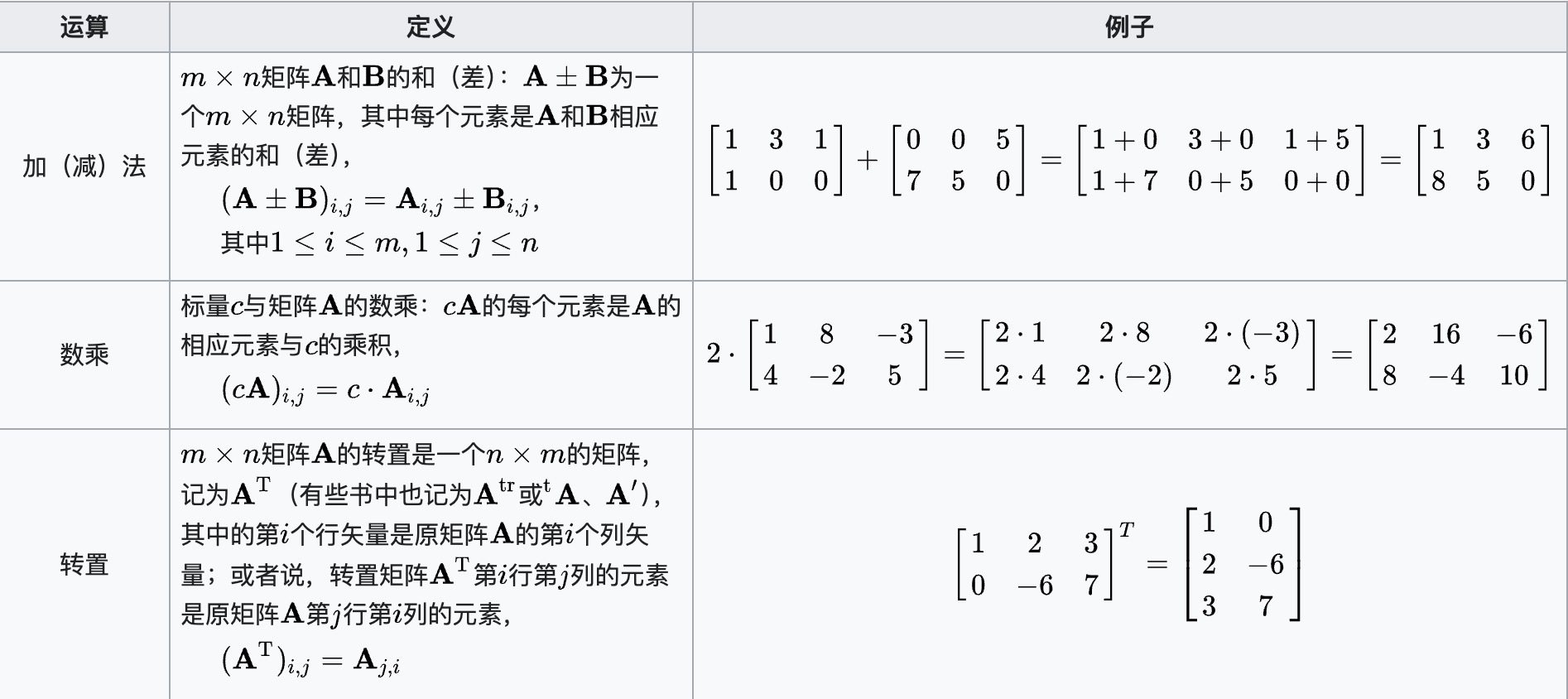
基本运算
性质
矩阵的加法运算满足交换律:
$A + B = B + A$
矩阵的转置和数乘运算对加法满足分配律:
$ (A+B)^{T} = A^{T} + B ^{T} $
$c(A + B) = cA + cB$
而转置和数乘运算满足类似于结合律的规律:
$c(A^{T})= c(A)^{T}$